|
μUAV Development Activities
Given the large number of unmanned aerial vehicles (UAVs) already available and the fact that our group came into this market relatively late, it has been our decision to focus on the smallest μUAV segment. If we look at a graph of payload versus endurance (Figure 1) we can see that a niche exists in the region of a payload of less than 1Kg and long endurance of the order of days, in our case provided by entirely autonomous landings to re-charge batteries using solar power. The nearest vehicle to ours is the “Scan Eagle” which is a gas-powered fixed-wing craft that has only manged an endurance of less than 20 hours with an 8 Kg payload and which is being developed for applications such as port monitoring and shipping security by the Navy (apart from its original military uses), though its cost is very high partly because it is able to control other UAVs. Moreover, the only rotary-wing micro-UAV currently operational is Honeywell's MAV, a short flight-time tactical craft, all others being fixed-wing planes, mostly powered by electricity. In fact, a recent study by Frost & Sullivan points out that a significant market in the short term will be that of μUAVs provided with advanced payloads, an area where we are highly competitive.
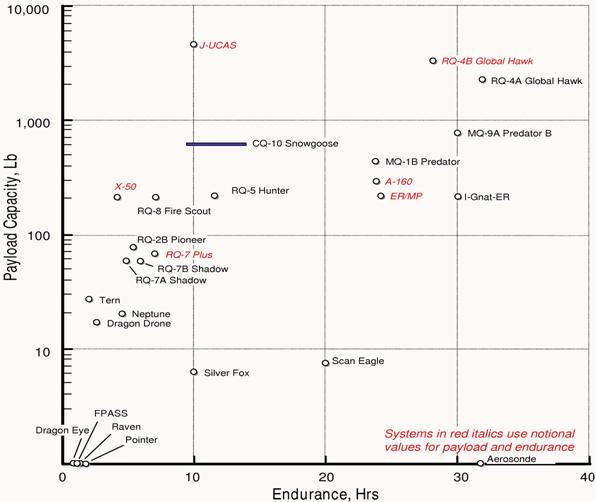
Figure 1- Endurance vs. Payload for many UAVs currently available.
There are two other major choices to be made in defining the type of vehicle to be built: electricity vs. gasoline and rotary vs. fixed wing crafts. Most UAVs are powered by gasoline engines of various types because of the weight/power advantage currently enjoyed by thee engines. However, there are already some experimental crafts using fuel cells with equivalent power/weight ratios, though much remains to be done. Since AVNTK has extensive experience in fuel cells, PV cells and advanced power electronics, we decided to use electric power for our craft. Finally, the type of applications curently being developed as well as most of those envisaged over the next 3-5 years are better satisfied by rotary-winged crafts so these were chosen over fixed-wing craft, which can cover larger distances but cannot hold a quasi-steady position or be brought down in the wild for autonomous re-powering. In order to rapidly absorb experience, technical details and deploy a micro-UAV, the german microKopter was initially acquired.
Figure 2 – Original microKopter and associated ground control station windows.
Based on this initial design, we have produced a number of μUAVs. The power plant is currently being improved to hold PV and PEM fuel cells, power-management installed capable of autonomously making the craft land to power-up during long endurance deployments, pan and tilt cameras capable of perch and stare, the capability to float, a water-quality monitoring sensor suite, RF communications, our LINUX-based avionics running on a 500MHz Blackfin processor and the vehicle is now control by the “Raphael” GCS, among many other improvements. Raphael now combines the standard functions of a GCS with functions such as distortion correction in imaging systems, super-resolution, enhanced depth-of-field, NASA DEM data for the whole world at 30 meters resolution, 3D reconstruction from full-motion video, multi-spectral analysis and access to satellite data for comparison purposes.
We are currently concentrating on two application areas: industrial raw material monitoring and environmental cartography and monitoring. The industrial raw materials application involves the measurement of the amount of raw material available in a steel mill belonging to Ternium, using our 3D reconstruction from FMV.

Figure 3 – Raw material piles whose volume needs to be estimated at Ternium, Monterrey, Mexico.
The environmental application involves two quite distinct aspects, a detailed high-resolution cartographic DEM obtained using our 3D-R-FMV algorithm and also the autonomous long-endurance measurement of environmental parameters in the San Pedro mangrove basin in the State of Nayarit, Mexico.
 

Figure 4 – Some images obtained by the marine μUAV in Nayarit of the beach and a 3D-from-video reconstruction of the region where an electricity dam is being proposed.
Super-resolution: Another common problem with UAV-derived imaging is that we often have 5-10 low-quality images of a target and require a single high-resolution image. So, an advanced sub-pixel resolution algorithm using wavelets was implemented.
 
(a) (b)
 
(c ) (d)
Figure 5 - Example of our super-resolution algorithm. (a) Original image, (b) Super-resolution image. (c ) Single image zoom and (d) Super-resolution detail.
|